真っ暗で高い水圧の深海を自在に動く無人探査機。みなさんは無人探査機というと、どんなものをイメージしますか?
ジャムステックでは、コンピュータに設定したルートに従って水中を移動し、障害物をよけながら自力で広い範囲を探査する「自律型無人探査機(AUV)」を開発しています。
このたび、そのAUVに新たな仲間が誕生しました(写真1)! 研究チームが開発したのは、「ゆめいるか」、「じんべい」、「おとひめ」です。3機のAUV同時製作は、世界初。どんなAUVか、その正体に迫ります!

写真1:横須賀本部の整備場にならぶ新しいAUV
日本周辺の海底には、メタンハイドレートや海底熱水鉱床などの資源が眠っています。資源を利用するには、どこにどんな資源がどれだけあるのか、海底はどんな地形か、などを知ることが必要です。
そこで開発したのが、「ゆめいるか」(図1)。 機体の後ろにスラスタを4基持ち、平均2〜3ノット(=時速4〜6キロ)で移動します。大容量リチウムイオン電池で、最大16時間探査できます。
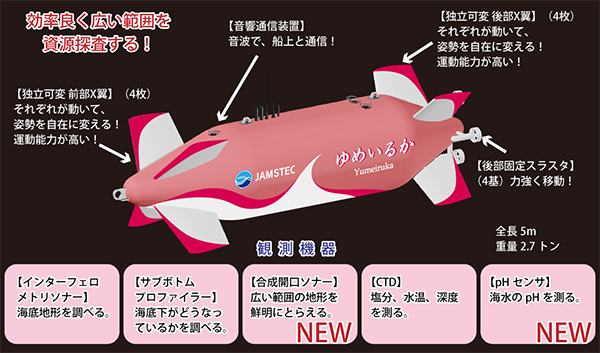
図1:「ゆめいるか」
海底地形は、合成開口ソナーという装置(図2)(参考:2011年2月4日発表)で広い範囲を鮮明にとらえます。その精度は、1km先にある野球ボールだって数えられるほど! 研究者は「海底地形は、インターネットと地図ソフトを使って誰でもすぐ見られるようにする予定です」と語ります。
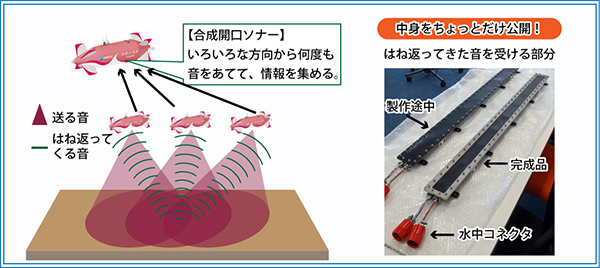
図2:合成開口ソナー
機体の前後には翼を4枚ずつ持ち、これらを協力させて動かすことで、姿勢を常に水平に保ちながら移動します(図3)。機体の底にある合成開口ソナーなどの向きがふらつかず、より精密に探査できるのです。
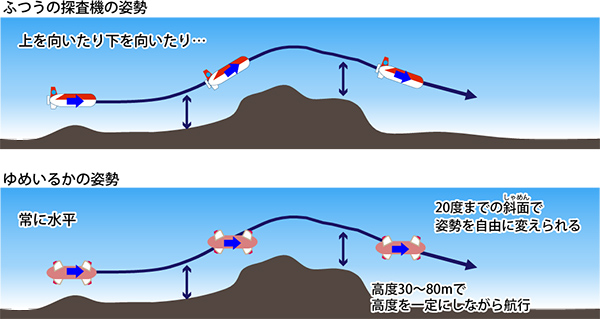
図3:機体を水平に保ったまま移動する「ゆめいるか」
「ゆめいるか」は、広く過酷な深海を、効率良く探査します。
地球温暖化の主な原因は、人間活動により放出される(自動車の排気ガスや工場のけむりなど)二酸化炭素(CO2)の増加と考えられます。そのCO2の約3割は、海に吸収されます。海のCO2が増えれば、海のpHは酸性に近づき生き物に影響を与える恐れがあります。このため、海のいまの状態を知ることはとても大切です。
そこで開発したのが、化学センサを使った計測が得意な「じんべい」(図4)です!
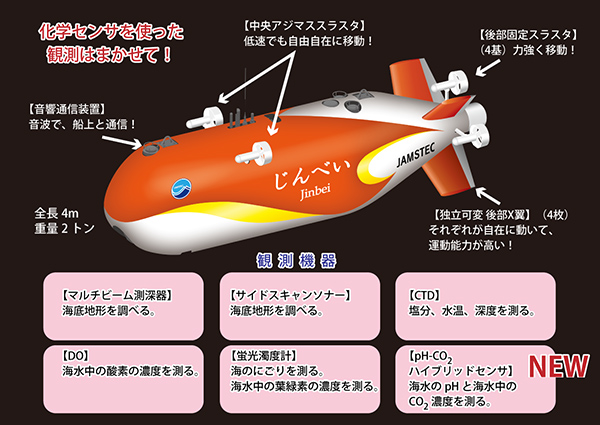
図4:「じんべい」
搭載するのは、新開発のpH-CO2ハイブリッドセンサ(図5)。深度3,000mまでCO2濃度とpHを同時に計測できる、世界初のセンサです。
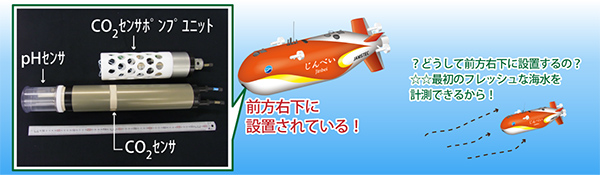
図5:pH-CO2ハイブリッドセンサ
CO2濃度が高くなるとpHは低くなる関係があるので、この2つの同時計測はとても重要です。研究者によると、「最大の強みは、「じんべい」とセンサが協力すること」とのこと。協力ってどういうこと? CO2濃度は計測に2〜3分かかってしまいますが、pHは数秒で計測できます。そこで、pHセンサで海水の変化を見つけると、「じんべい」が「その海水を貯めて!」とセンサに命令を出して、その貯めた海水のCO2濃度をCO2センサが時間をかけて計測するのです。「じんべい」とセンサの協力により、今までは取り逃がしていたような貴重なデータを取れるし、広い範囲を連続的にくわしく計測できるようになります!
また、こまかく計測を行うには、「じんべい」は時にゆっくり走らなければなりません。そこで、機体の中央にスラスタを付けて、低速(約0.7ノット=時速1.3キロ)でも安定して走れるようにしました。機体中央のスラスタは、ジャムステック初! これまでのAUVの多くは翼で機体を動かすため低速が苦手でしたが、「じんべい」は低速から高速まで状況に適した速度で移動します。
もし「じんべい」などが特徴的な海域を発見したら、そこをくわしく調べる必要がありますね。そこで登場するのが、「おとひめ」です(図6)! 他の会社と一緒に開発した「ゆめいるか」や「じんべい」とちがい、「おとひめ」はジャムステックだけで開発した手造り探査機です。
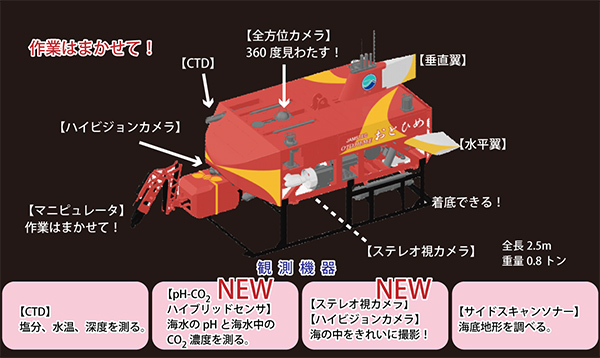
図6:「おとひめ」
研究者は、「国産にこだわり、日本初、そして世界初を目指しました」と話します。例えば、機体のお腹につけた「ステレオ視カメラ」。2台の高性能デジタルカメラで異なる位置から撮影することで、海底地形の大きさなど立体情報(3次元)を集めます(図7)。
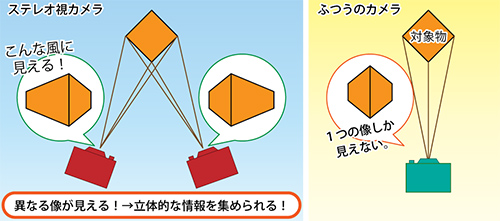
図7:ステレオ視カメラの原理イメージ
深海で大きさなどを測るのは難しいのですが、開発したステレオ視カメラを使えば、センチメートル単位以下の細かさでとらえられます!
機体の先頭につけたマニピュレータも、水中用では初の国産品! 研究者がゼロから開発しました。器用な手先で、サンプルを丁寧に集めます。
そして「おとひめ」は、自力で探査するだけではなく、研究者が船からコントロールする「遠隔操縦」も可能です。遠隔操縦は2種類。1つ目は、直径1mmの細い光ファイバで船とつなぐ「光遠隔操縦」です(図8)。研究者は、光ファイバで送られてくるハイビジョンカメラの映像を船上で確認しながら、マニピュレータでサンプルを集めることができます。
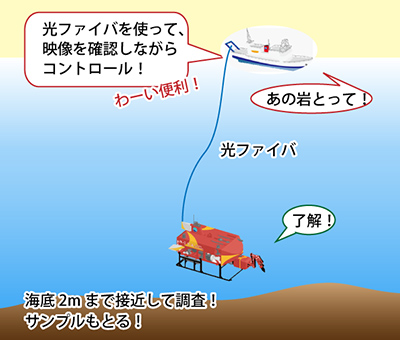
図8:光遠隔操縦
もう1つは、音波を使う「高速音響通信」です。その速さは、光遠隔操縦に劣
りはするものの、他の2機の約4倍! ただ、音波だと、大容量の映像は遠くまでは送れません。「おとひめ」は気になるところを海底に近づいて詳しく調べる機体なので、研究者は船上からリアルタイムで映像を見れると大変便利。そこでまず、映像を
通信中継装置に送り、そこから光ファイバで船に送るようにしました(図9)。研究者は、状況にあわせて探査内容やルートを変更できます。光ファイバがからまる心配もなく「おとひめ」も身軽!
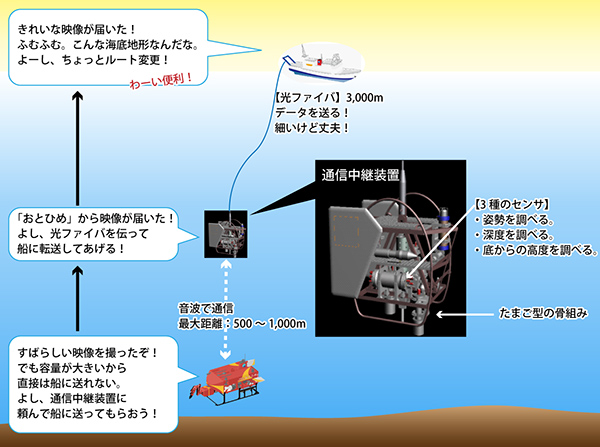
図9:高速音響通信での遠隔操縦
新たなAUV3機は、これまでのAUVより海底に近づき海底を精密に調査できます。また、小型なのでどの研究船にものせて運べ、メンテナンスも楽。異なる得意技を持つ3機を組み合わせることで、海洋調査の幅がさらに広がります。
本格的に動き始める時期は、「ゆめいるか」と「じんべい」は平成25年度、「おとひめ」は平成26年度を目指します。それまで、多くの研究者や技術者が一丸となって毎日がんばります!









