プレスリリース
2015年 4月 9日
国立研究開発法人海洋研究開発機構
クローラ式無人探査機を用いた高効率海中作業システムの開発に
アラウンドビューモニター技術を活用
~JAMSTEC、日産、トピー工業の共同開発により海中作業効率の飛躍的な向上を期待~
1.概要
国立研究開発法人海洋研究開発機構(理事長 平 朝彦、以下「JAMSTEC」)、日産自動車株式会社(社長 カルロス ゴーン、以下「日産」)、及び、トピー工業株式会社(社長 藤井 康雄、以下「トピー工業」)の3社は、内閣府が進める戦略的イノベーション創造プログラム(SIP:※1)の課題の一つである「次世代海洋資源調査技術(海のジパング計画)」において、JAMSTECが開発する高効率海中作業システムに必要な要素技術の一つとして、JAMSTECとトピー工業が共同で開発を進める推進システムの要素試験機に、日産のアラウンドビューモニター技術を応用するため、2014年12月1日付で共同開発契約を締結し、この度、アラウンドビューモニターを取り付けた要素試験機を製作するに至りました。
世界第6位の面積をもつ日本の広大な排他的経済水域(EEZ)には、海底熱水鉱床等の有望な鉱物資源の存在が知られていますが、その広大な海域を効率よく調査する技術は開発途上にあります。こうしたなか、「次世代海洋資源調査技術」の実施機関であるJAMSTECでは、SIPの枠組みのもと、既存のROVに装着可能な高効率海中作業システムの開発に取り組んでおり、その一環として国内トップレベルのクローラロボット開発メーカーであるトピー工業の協力を得て多点コアリングシステムに必要となるクローラの開発を進めています(図1)。クローラ式を採用することにより、起伏のある海底面でも安定した状態でサンプリング調査を行うことが可能となります。しかし母船上の管制室からこのROVを遠隔操作する際、視野の狭い従来のカメラを用いたシステムでは多数のカメラ画像を同時に見比べる必要があり、クローラ周りの起伏のある海底の状況が把握できず、クローラ装着のROVのオペレーションが不可能でした。
そこで、JAMSTECでは、日産が開発した、立体的な映像処理機能を加えた新たなアラウンドビューモニター技術(※2)の活用を検討してきました(図2)。本技術と障害物までの距離を正確に計測するセンサーを組み合わせることにより、ROV搭載カメラの映像を用いるだけで、あたかもROV自身を客観視する様な映像をリアルタイムで表示することが可能となります(図3)。これにより、母船で操作するオペレーターが瞬時に海底やROVの状態を把握できるようにすることで、海中作業効率の大幅な改善を狙っています。
今後、平成30年頃までに要素試験機の実海域試験を行い、海洋鉱物資源調査での実用化を目指し、必要な技術の開発を進めて参ります。本研究開発のように民間と協力して開発した技術は、民間への技術移転が容易であり、日本の海洋資源調査に早期に役立てられると期待されます。
なお、JAMSTECと日産は、同じ神奈川県内に本社および研究所を構えるという地理的利点を生かし、これまでにも共同研究の実績があります。同じくトピー工業も、JAMSTECの技術開発に協力いただいてきた実績が多数あります。今般の共同開発契約は、こうした経緯のもと実現したものです。今後とも民間企業と連携し、共同研究を積極的に実施していきます。
※1 戦略的イノベーション創造プログラム(SIP)
総合科学技術・イノベーション会議(CSTI)が自らの司令塔機能を発揮して、府省の枠や旧来の分野の枠を超えたマネジメントに主導的な役割を果たすことを通じて、科学技術イノベーションを実現するために平成26年度より5カ年の計画で新たに創設したプログラム。CSTIにより選定された10課題のうち、「次世代海洋資源調査技術(海のジパング計画)」(プログラムディレクター 浦辺 徹郎、東京大学名誉教授、国際資源開発研修センター顧問)ではJAMSTECが実施機関を務めており、海洋資源の成因に関する科学的研究、海洋資源調査技術の開発、生態系の実態調査と長期監視技術の開発を実施し、民間企業へ技術移転する計画となっている。
※2 アラウンドビューモニター技術
車の真上から見ているかのような映像によって周囲の状況を知ることで、駐車を容易に行うための運転支援技術。日産が2007年に世界で初めて市販化し、その後2011年に移動物検知機能を追加する等、進化を続けている。
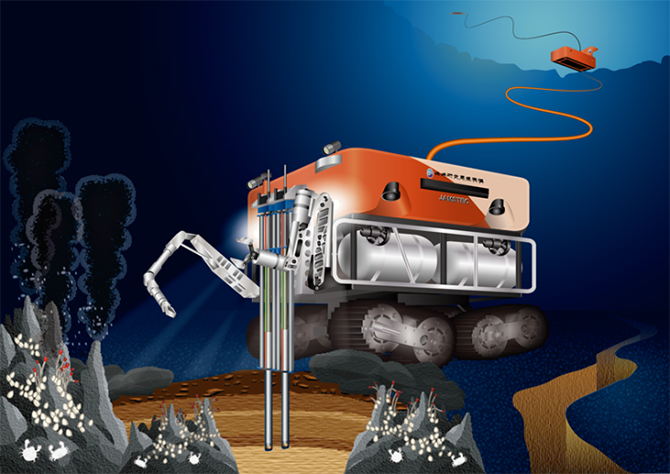
図1 高効率海中作業システムを搭載したROVイメージ。海底下の鉱床の広がりや鉱物の含有物質を調査するため、広範な多くの地点でのコア試料採取を実現する。既存のROVに装着可能で、新たに海洋資源調査に参入する民間企業でも安易に導入できるシステムを目指している。

図2 ROV用画像システム試験機。4つのカメラと4つのレーザーレンジファインダーからの情報を処理する新たなアラウンドビューモニター技術を用いた装置(画像上)を、フリッパ式クローラを持つ小型ROV(画像中央から下)に搭載して試験を実施した。
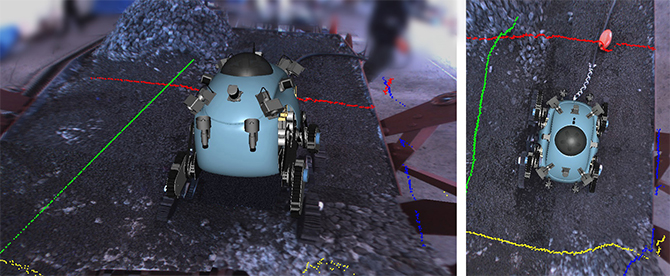
図3 試験機のモニタに表示される全周囲映像。(図左)あたかも前方の別カメラから撮ったように見えるが、すべてROV搭載カメラからリアルタイムに生成されている。ROVがCGで表示されているのは自分自身を撮影していないためで、実際にはこの位置にシステムを搭載した試験機が存在し、模擬海底上を移動している。赤、緑、黄、青の細い線は、レーザーレンジファインダーによる周辺のスキャン結果で、起伏情報が表示されている。(図右)別の視点に瞬時に変更することもできる。
【日産より発表】
日産自動車、次世代海洋資源調査プログラムに協力
~ アラウンドビューモニター技術を遠隔操作無人探査機に活用 ~
Nissan AVM tech goes underwater for deep sea exploration
【トピー工業より発表】
クローラーロボット技術を次世代海洋資源調査に展開
~高効率操作技術に関する共同開発契約を締結~
- (本プロジェクトについて)
国立研究開発法人海洋研究開発機構 - 海洋工学センター 海洋技術開発部 海洋基盤技術グループ
主任技術研究員 澤 隆雄 - (報道担当)
国立研究開発法人海洋研究開発機構 - 広報部 報道課長 松井 宏泰